2015 年に 2万円台で購入した ASUS EeeBook X205TA を引張り出してきまして、プリインストールの Windows 10 を削除、Ubuntu 22.04 LTS の導入をしてみました。
CPU は Intel Atom の 1.33GHz、メモリー 2GB、 内蔵ストレージ eMMC 64GB といった当時としてもロースペックの格安機です。2014 年末発売とのこと。
10.1 インチ、重さ 980g 程度と持ち運びが容易で、バッテリーも 8 時間程度もち、またキーボードも癖がなかったため、かばんに忍ばせ比較的重宝していました。その後、ストレージの少なさから Windows 10 のアップデートができない状態となりお蔵入りとなった経緯です。
本日ふと存在を思い出し、OSC などの展示ブースでサイネイジ的に画面を表示してそっと置いておくのにまだ使えるかもとレストア。なお、しばらく電源を入れていなかったのでバッテリーは充電されずでした。
この機械の購入時は Linux のデバイスサポートが良くない状況だったため Windows で利用していたのですが、今回 Ubuntu 22.04 の導入を試行してみたところ、懸案だった無線 LAN はそのまま動作。Bluetooth は動作未確認ですが OS からは認識し問題なさそうです。
残念ながらサウンドデバイスは認識しているものの、発音から 1分程度で必ず同一周波数の謎のビープ音(矩形波)が鳴り響くという状況でした(この部分は解決できず )(修正できたので記事に対応方法を追加しました)。技術的になぜなのか気になりますが、音声が必要な場合は USB DAC や Bluetooth スピーカなどを接続して逃げるといいのかもしれません。
起動時の dmesg:
eeebook-dmesg-ubuntu-6.2.0-63-generic.log
そんなこんなで Ubuntu 導入をして復活できましたので、以下に手順をメモしておきます。
32bit EFI GRUB 起動
この機械は起動時の EFI が 64bit ではなく 32bit モードで起動されるとのことで、通常の Ubuntu 22.04 LTS の ISO イメージがブートできません。てなわけで、Ubuntu 22.04 の ISO イメージを USB メモリーに焼いた後、 boot/efi 配下に以下の 32bit 用の実行ファイルを配置します。
https://github.com/jfwells/linux-asus-t100ta/blob/master/boot/bootia32.efi
この操作で Ubuntu 22.04 インストレーション用の起動 USB メモリーができたら、おもむろに X205TA の USB ポートに差し込み、電源を入れ即座に ESC キーを連打して起動メニューを立ち上げます。
最初に「Enter Setup」で BIOS 設定を表示し Secure Boot を disable に設定保存後、もう一度同じ操作で ESC 連打で次は「UEFI: SanDisk」(USBの名前)を選択して Ubuntu 22.04 のインストーラを起動します。
あとは道なりに進めばインストールの最終段階まで進めるはずです。かなり遅いのでがんばります。ストレージが 64GB と小さいのでインストールオプションでは「最小インストール」を選択すると良いと思います。
ちなみに自分は初回 eMMC にパーティションテーブルを書き込むところ(Windows 10 を消すところ)でマウスカーソルごとフリーズしましたが、再起動後に最初からリトライしたところ通過しました。原因は不明です。
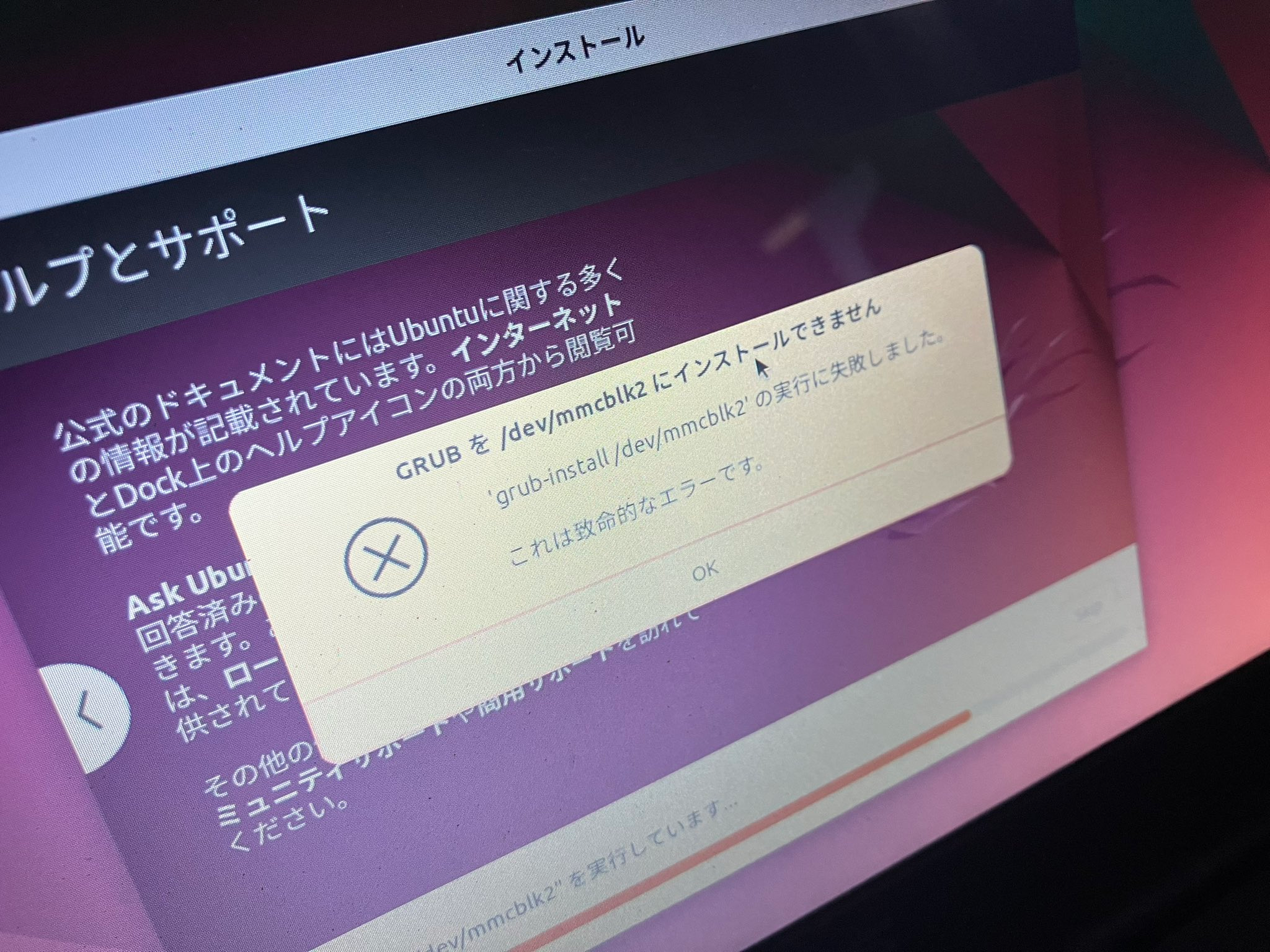
インストールはしばらくかかりますが、最終段階でおそらく「GRUB を /dev/mmcblk2 にインストールできません。 grub-install /dev/mmcblk2 の実行に失敗しました。これは致命的なエラーです」が表示されると思います。
対応するためいったん OK で無視して、USB メモリーを挿したまま X205TA の再起動をかけます。
eMMC 側にも 32bit EFI 向けのブートバイナリを配置
ESC 連打で USB メモリーから再びブートし、今度は GRUB の起動メニューで「c」を押下して GRUB のプロンプトを出し、次のようにコマンドを打って eMMC 側の Ubuntu 22.04 を起動してあげます。(いったん eMMC のブートローダを使わずに USB メモリー内のブートローダから eMMC 内の Ubuntu を起動する形になります)
入力する GRUB コマンド:
> set root=(hd1,gpt2)
> linux /boot/vmlinuz-6.2.0.26-generic root=/dev/mmcblk2p2
> initrd /boot/initrd.img-6.2.0-26-generic
> boot
コマンド内のファイル名中のバージョン識別は、Ubuntu 22.04 を導入時期によってバージョンが変わると思いますので、適宜コマンドを修正してください。ファイルシステムのファイル名はタブキーで補完(表示)できます。
boot コマンド投入後 eMMC に導入された Ubuntu 22.04 LTS が起動するはずです。
Ubuntu 22.04 GUI 起動後、言語などの初期設定を経てから、ターミナルエミュレータから次のようにして eMMC 内に 32bit EFI 向けの GRUB ブートを構成します。
$ sudo apt update
$ sudo apt upgrade
$ sudo apt install grub-efi-ia32-bin
$ sudo grub-install --efi-directory=/boot/efi
$ update-grub
以下、実行ログです。
$ sudo apt install grub-efi-ia32-bin
$ sudo ls -laF /boot/efi/EFI/BOOT # BOOTIA32.EFI があることを確認
合計 1984
drwx------ 2 root root 4096 11月 3 20:27 ./
drwx------ 4 root root 4096 11月 2 23:09 ../
-rwx------ 1 root root 106496 11月 3 10:37 BOOTIA32.EFI*
-rwx------ 1 root root 960472 11月 4 10:19 BOOTX64.EFI*
-rwx------ 1 root root 88296 11月 4 10:19 fbx64.efi*
-rwx------ 1 root root 860824 11月 4 10:19 mmx64.efi*
$ sudo grub-install --efi-directory=/boot/efi/
Installing for i386-efi platform.
Installation finished. No error reported.
$ sudo update-grub
Sourcing file `/etc/default/grub'
Sourcing file `/etc/default/grub.d/init-select.cfg'
Generating grub configuration file ...
Found linux image: /boot/vmlinuz-6.2.0-36-generic
Found initrd image: /boot/initrd.img-6.2.0-36-generic
Found linux image: /boot/vmlinuz-6.2.0-26-generic
Found initrd image: /boot/initrd.img-6.2.0-26-generic
Memtest86+ needs a 16-bit boot, that is not available on EFI, exiting
Warning: os-prober will not be executed to detect other bootable partitions.
Systems on them will not be added to the GRUB boot configuration.
Check GRUB_DISABLE_OS_PROBER documentation entry.
Adding boot menu entry for UEFI Firmware Settings ...
done
実行できたら USB メモリーを抜いて eMMC から通常ブートしてみます。うまくいけば eMMC 上の Ubuntu 22.04 が起動すると思います。
SD カードスロット
Ubuntu デフォルト導入では SD カードスロットが認識しないため、次のように操作して認識させます。
$ echo "options sdhci debug_quirks=0x8000" | sudo tee /etc/modprobe.d/sdhci.conf
$ sudo update-initramfs -u -k all
update-initramfs コマンドは 10 分程度かかります。コマンドが戻ってきたら OS を再起動し、メディアを挿すと SD カードがオートマウントされるはずです。
参考 URL:
https://github.com/RobotGhost/ubuntu-x205ta/blob/master/debian-fixes-x205ta.md#microsd-card-reader
サスペンド後のトラックパッドの動作
サスペンド復帰後、トラックパッドが動作しなくなりマウスカーソルの移動やクリックができなくなります。
elan_i2c の dmesg エラーログ:
[ 1309.121342] elan_i2c i2c-ELAN0100:00: invalid report id data (1)
elan_i2c モジュールかバス初期化の不具合と思いますが、次のようにリロードしてあげると動作を再開します。
$ sudo modprobe -r elan_i2c && sudo modprobe elan_i2c
ターミナルにカーソルを移せない場合は、CTRL + ALT + F3 でコンソールを開くと良いかもです。(GUI に戻すのは CTRL + ALT + F2)また、上記のコマンドを systemd の suspend/resume 契機にうまいこと入れると自動復帰できるようになるかもしれません(未実施)。
サウンド設定
この記事の最初で書いた通りサウンドについてはアプリケーションから発音させると数十秒は正しく動作しますが、その後ビープ音(必ず同じ周波数の矩形波)が鳴り響きだすという謎の事象が発生します。
これを解消するために次のようにサウンドデバイスを構成します。
# 念の為必要のない HDMI サウンドデバイスを見えないように
$ echo "blacklist snd_hdmi_lpe_audio" | sudo tee /etc/modprobe.d/50-block-hdmi-audio.conf
# dsp_driver を SOF にすると不具合でビープ音となるようなので alsa で SST を使うように設定(dsp_driver:Force the DSP driver for Intel DSP (0=auto, 1=legacy, 2=SST, 3=SOF)
$ echo "options snd-intel-dspcfg dsp_driver=2" | sudo tee -a /etc/modprobe.d/alsa-base.conf
OS 再起動後の aplay -l ログ:
$ aplay -l
**** ハードウェアデバイス PLAYBACK のリスト ****
カード 0: chtrt5645 [chtrt5645], デバイス 0: 1 []
サブデバイス: 1/1
サブデバイス #0: subdevice #0
カード 0: chtrt5645 [chtrt5645], デバイス 1: Deep-Buffer Audio (*) []
サブデバイス: 1/1
サブデバイス #0: subdevice #0
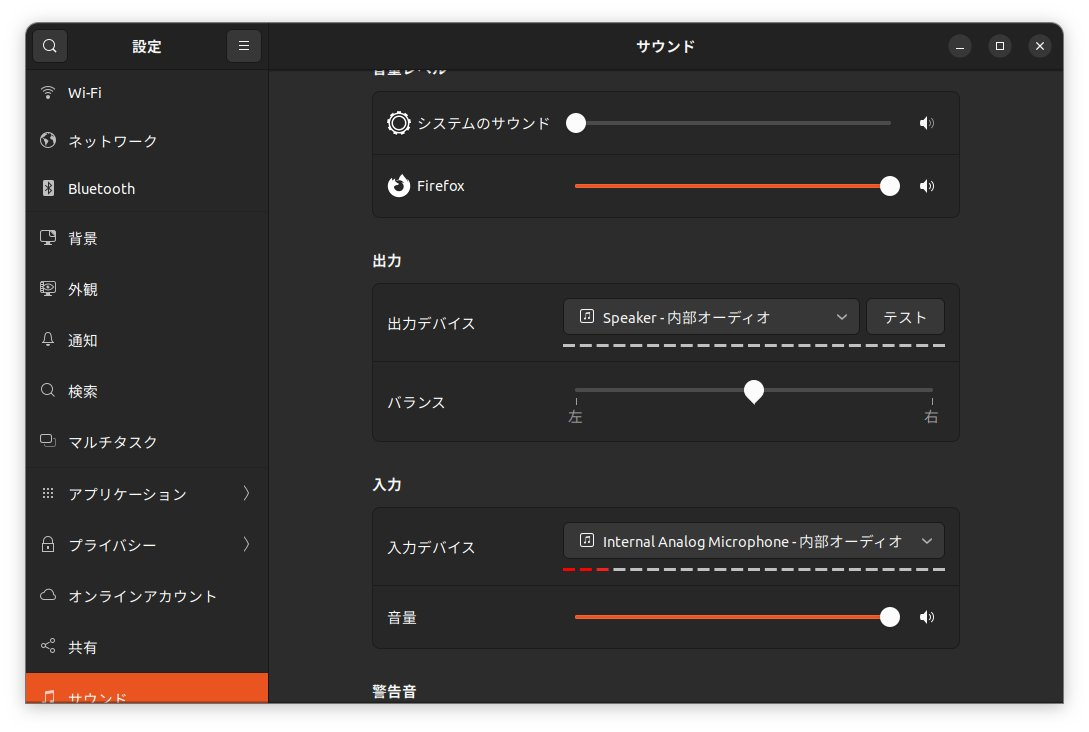
Ubuntu (PulseAudio) 的には次のように見え、ウェブブラウザーなどのアプリケーションから正しく音声が発音するようになっていると思います。
参考 URL:
[BUG] sof-audio-acpi-intel-byt stops and give a screaming high sound #4662
alsamixer から見たサウンドカードの認識:
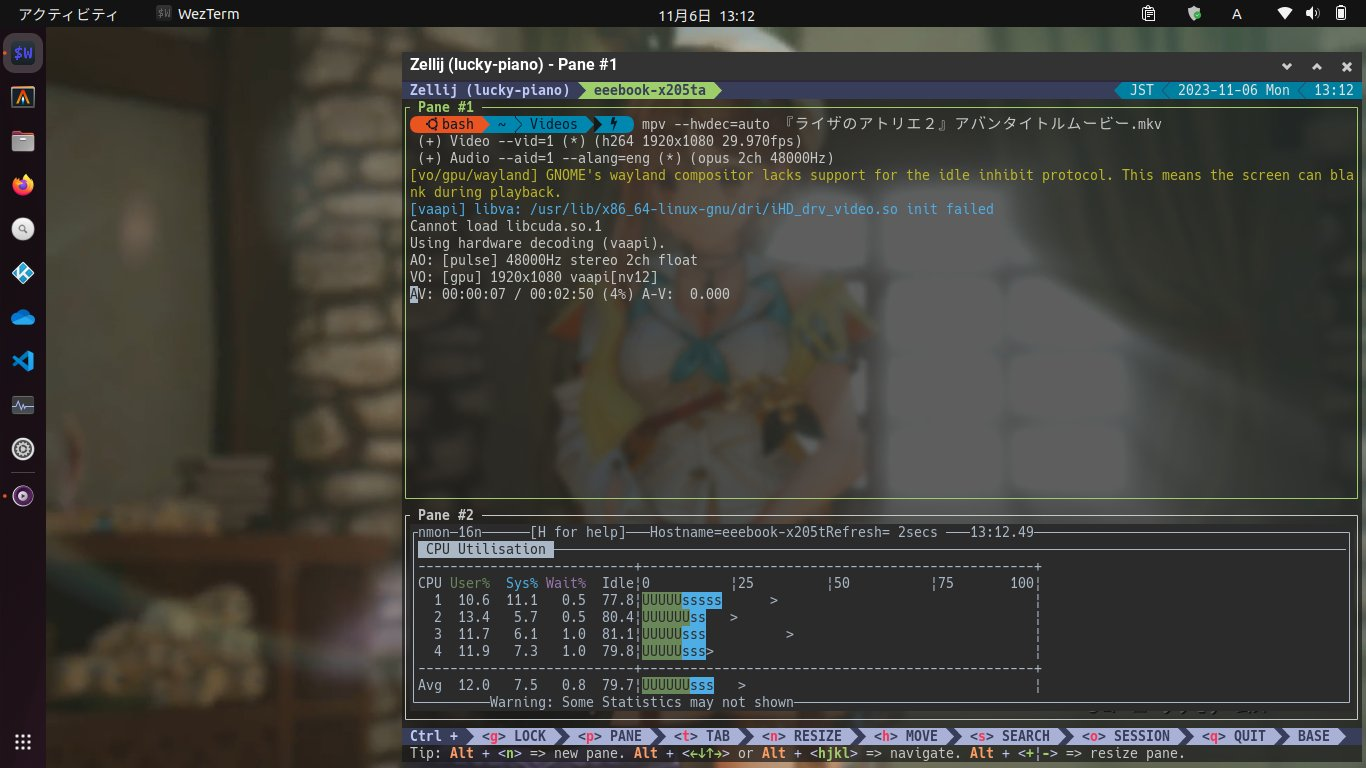
動画再生支援
CPU の動画再生支援は設定無しでうまく動作するようです。フルHD 動画が CPU 4コア 25% 程度でフレームドロップなく再生できました。
$ sudo apt install mpv
$ mpv --hwdec=auto hegohego.mpv
(+) Video --vid=1 (*) (h264 1920x1080 29.970fps)
(+) Audio --aid=1 --alang=eng (*) (opus 2ch 48000Hz)
[vo/gpu/wayland] GNOME's wayland compositor lacks support for the idle inhibit protocol. This means the screen can bla
nk during playback.
[vaapi] libva: /usr/lib/x86_64-linux-gnu/dri/iHD_drv_video.so init failed
Cannot load libcuda.so.1
Using hardware decoding (vaapi).
AO: [pulse] 48000Hz stereo 2ch float
VO: [gpu] 1920x1080 vaapi[nv12]
AV: 00:02:17 / 00:02:50 (80%) A-V: 0.000 Dropped: 3
[input] No key binding found for key 'MBTN_MID'.
AV: 00:02:19 / 00:02:50 (82%) A-V: 0.000 Dropped: 3
Exiting... (Quit
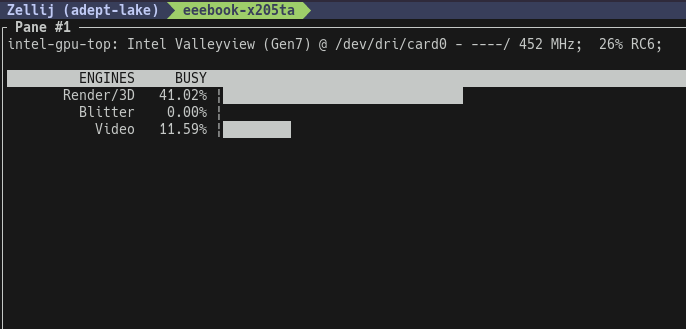
intel_gpu_top で VA-API が使われている様子をみた図:
$ sudo apt install intel-gpu-tools vainfo
$ export LIBVA_DRIVER_NAME=i965 # .bashrc に入れても良いかもです。
$ vainfo
libva info: VA-API version 1.14.0
libva info: User environment variable requested driver 'i965'
libva info: Trying to open /usr/lib/x86_64-linux-gnu/dri/i965_drv_video.so
libva info: Found init function __vaDriverInit_1_10
libva info: va_openDriver() returns 0
vainfo: VA-API version: 1.14 (libva 2.12.0)
vainfo: Driver version: Intel i965 driver for Intel(R) Bay Trail - 2.4.1
vainfo: Supported profile and entrypoints
VAProfileMPEG2Simple : VAEntrypointVLD
VAProfileMPEG2Simple : VAEntrypointEncSlice
VAProfileMPEG2Main : VAEntrypointVLD
VAProfileMPEG2Main : VAEntrypointEncSlice
VAProfileH264ConstrainedBaseline: VAEntrypointVLD
VAProfileH264ConstrainedBaseline: VAEntrypointEncSlice
VAProfileH264Main : VAEntrypointVLD
VAProfileH264Main : VAEntrypointEncSlice
VAProfileH264High : VAEntrypointVLD
VAProfileH264High : VAEntrypointEncSlice
VAProfileH264StereoHigh : VAEntrypointVLD
VAProfileVC1Simple : VAEntrypointVLD
VAProfileVC1Main : VAEntrypointVLD
VAProfileVC1Advanced : VAEntrypointVLD
VAProfileNone : VAEntrypointVideoProc
VAProfileJPEGBaseline : VAEntrypointVLD
$ sudo intel_gpu_top
ウェブブラウザの YouTube 再生は残念ながら標準 codec が H264 ではなくなっているため、動画再生支援は使われず。ウェブサイト自体が重たいためこの機械で YouTube を使うことはないだろうと今回はやっていませんが、ブラウザに YouTube H264 化系の拡張を入れると URL 変換でなんとかなるのかもしれません。
おわりに
最後に動作試験的に、Alacritty、gcc や Rust の開発系、Helix Editor や Zellij ターミナルマルチプレクサなどを入れ、CUI 環境でコードリーディングくらいできるところまで環境設定してみました。Rust 系のアプリケーションは cargo install でビルドして導入しています。ストレージは残り半分(32GB)といった感じになりました。
検証でまる一日程度使ってみた感じですが、この機械はストレージの遅さが使用感を損ねている場合が多いようですので、Ubuntu Frame などで GDM ログインや GNOME Shell を介さずに Kodi など特定用途のアプリケーションを kiosk 起動するように構成するのもいいかもしれません。(アプリがメモリーに載ってしまえば結構動きます)
というわけで、Ubuntu 22.04 LTS のサポート期間は 2027-04 で、Ubuntu Pro を enable にするとさらに 5年だと記憶していますので、ハードウェアが壊れるまでこのままいけそうです。w
関連